
时间: 2023-12-14 08:54:37 作者: 半岛官方登录入口
伴随着智能化的加快速度进行发展,驱动汽车不断朝着智能出行机器人方向演进,作为支撑这一变革的关键基础,整车架构也面临着前所未有的深度重构。
目前一致认为,高度集成的“中央计算+区域控制”式中央计算架构将成为行业终局形态。眼下,很多整车厂和核心技术提供商都在推动这一新架构落地应用。
不过,汽车行业在过去百余年的发展中,已形成了一套成熟且稳固的开发体系,整车架构的中央集成化,意味着这一体系也将随之被重构。如何构建面向高度集成化架构的全新开发体系,成了汽车行业亟待解决的问题。
基于此背景,东软睿驰提出了创新的openVOC(Vehicle On Chip)开放技术框架,旨在推动整个行业对车内通讯架构、计算模型、应用软件开发方法等形成更一致的共识,让OEM、软件供应商、第三方应用开发者在共通的理解下分工协同,推动整个生态重新进入有序发展的平稳状态。
11月30日,东软睿驰举办“openVOC首届开发者生态大会”,期间东软睿驰不仅对这一全新技术框架进行了详细介绍,还宣布基于openVOC开放技术框架,对NeuSAR软件开发平台核心组件做全面升级,并正式推出了符合openVOC开放架构的产品实践案例X-Center 2.0,为openVOC软件架构的规模化量产落地提供了参考依据。

近年来,智能电动汽车的加快速度进行发展,极大地拓展了整车功能和应用场景的同时,也在全面重构汽车的架构和形态。
在传统燃油车时代,整车架构一直以分布式为主,这种架构由于各模块功能划分明确,独立性强,具备较高的稳定性和可靠性。然而随只能汽车的蓬勃发展,推动整车功能日趋复杂化,由此带来的应用拓展需求,大大超出了分布式架构的承受极限。
为了应对这些挑战,主流车企及Tier1纷纷开始推进整车电子电气架构变革,往域集中甚至集成化程度更高的中央计算架构发展,东软睿驰亦不例外。

在东软睿驰看来,未来汽车要想从传统代步工具真正迈向集“出行+空间+大模型智能”于一身的超级智能体时代,离不开核心“三大件”——Face、Brain和Body。
“这里的Face即面向用户的交互界面,主要承载基于Android系统的交互式应用;Brain指代用来思考和运算的中央超算电脑,承载高性能高安全性要求的复杂逻辑计算;而Body,则是负责行为执行的车体部件。”东软睿驰总经理曹斌指出。
为此,在本次开发者生态大会上东软睿驰正式提出了面向智能出行机器人的“FBB构型”,旨在重新定义未来汽车的智能部件产品形态。
事实上,过去一段时间,不少整车企业已经在积极地推进这样的架构变革。比如小鹏汽车XEEA2.0 ,理想汽车LEEA2.0,零跑汽车LEAP 2.0,以及广汽星灵架构、上汽零束银河®全栈1.0、长城GEEP3.0等,都已经实现了智驾、智舱、车控等核心功能域的集中控制。目前,大家正朝着下一阶段的多域融合持续升级,最终迈向中央计算时代。
然而,整车EE架构变革,中央集成式固然是大势所趋,在实际落地过程中面临的挑战不容忽略。
一个很现实的问题是,全世界汽车产业历经过去百余年的沉淀,已形成了相对来说比较稳定的开发体系和商业模式。“在这套体系中,行业的开发流程和体系、软硬件开发效率、商业关系乃至整个汽车的成本模型,都已经十分稳固。”曹斌指出。
但随着新一代EE架构加快速度进行发展,驱动大量新计算以及软件资源被引入车内,整车所搭载的软件规模不断攀升,依靠传统开发方式越来越难以满足需求。尤其在高度集成化架构下,未来整车计算将被集成在由少数几颗高性能芯片组成的芯片组甚至一颗超算芯片上,如何让不同程序员、软件组织的创新成果能快速落地转化,将至关重要。
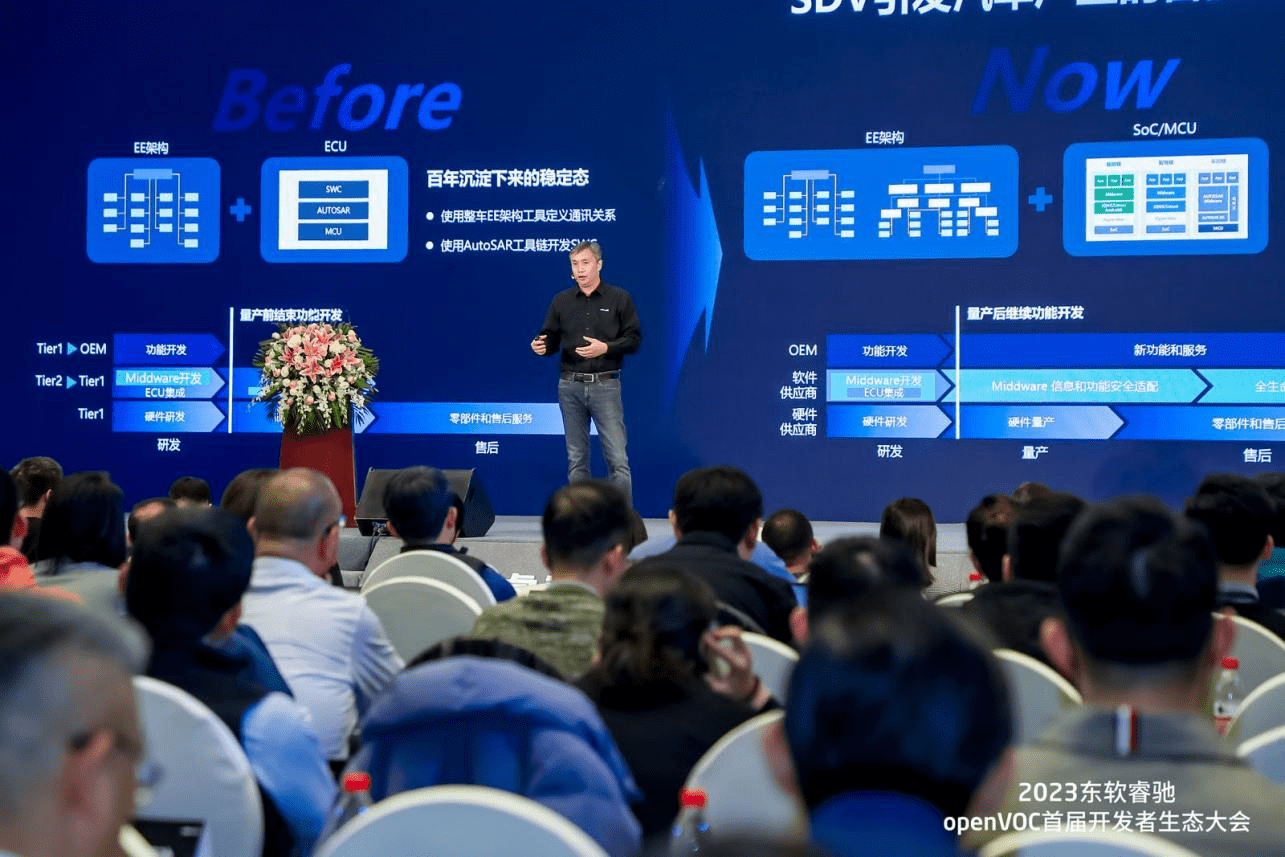
“在传统ECU形态所驱动的开发模式里,如果要进行大规模软件开发,比如无人驾驶域控、车身域控、中央域控的研发,往往需要几百人甚至上千人一起工作,最后进行系统集成。这种模式下做一次集成就需要几十个小时,可能最后通过测试,还会发现很多新的问题,又需要把这些流程重新走一遍。”曹斌表示。这样导致的结果是,不仅开发成本会大幅攀升,并且周期长。
据相关分析多个方面数据显示,传统汽车工业产品研究开发因为体系复杂,在整车研发的过程中往往有大量的重复适配、软件重构工作,整车修改bug、软件重构时间消耗巨大,导致实际的工程成本远高于创新成本,粗略比例约为50:1,很大程度上拖累了行业整体的创新效率。
而当前,随只能电动汽车的加快速度进行发展,大量新技术被频繁引入汽车行业,新一轮竞争的核心恰恰是创新技术的导入速度以及创新成本。这在某种程度上预示着,对整车软件开发方法和体系的变革势在必行。
在“软件定义汽车”趋势下,汽车行业早已意识到软件开发模式重构的重要性。但毋庸置疑,直到现在业界仍未形成统一且标准的体系。
在曹斌看来,这背后的原因是多方面的:第一,不同车企EE架构演进节奏不一,甚至同一车企在不同车型开发过程中也可能使用不相同架构,导致软件开发高度“定制化”;第二,EE架构复杂多变,让应用软件所在控制器无法标准化,应用软件开发者难以进行相对有效的中长期规划;第三,行业对软件计算形态理解不一致,导致开发方法、通讯方法也十分多元化。
正是洞察这一点,基于在“软件定义汽车”领域多年的深耕,以及业内倡导软硬解耦的基础上,东软睿驰进一步提出了软软解耦,以及基于该理念的openVOC开放技术框架。
“我们希望能够通过这样一套框架,让底层软件与上层应用也能够充分解耦,从而构建一个开放共赢、灵活高效的创新生态,让软件开发者们即使身处各地,也能快速将不同应用组件在标准的、统一的平台做组装式、集成式的模块化开发,提高创新效率。”曹斌指出。
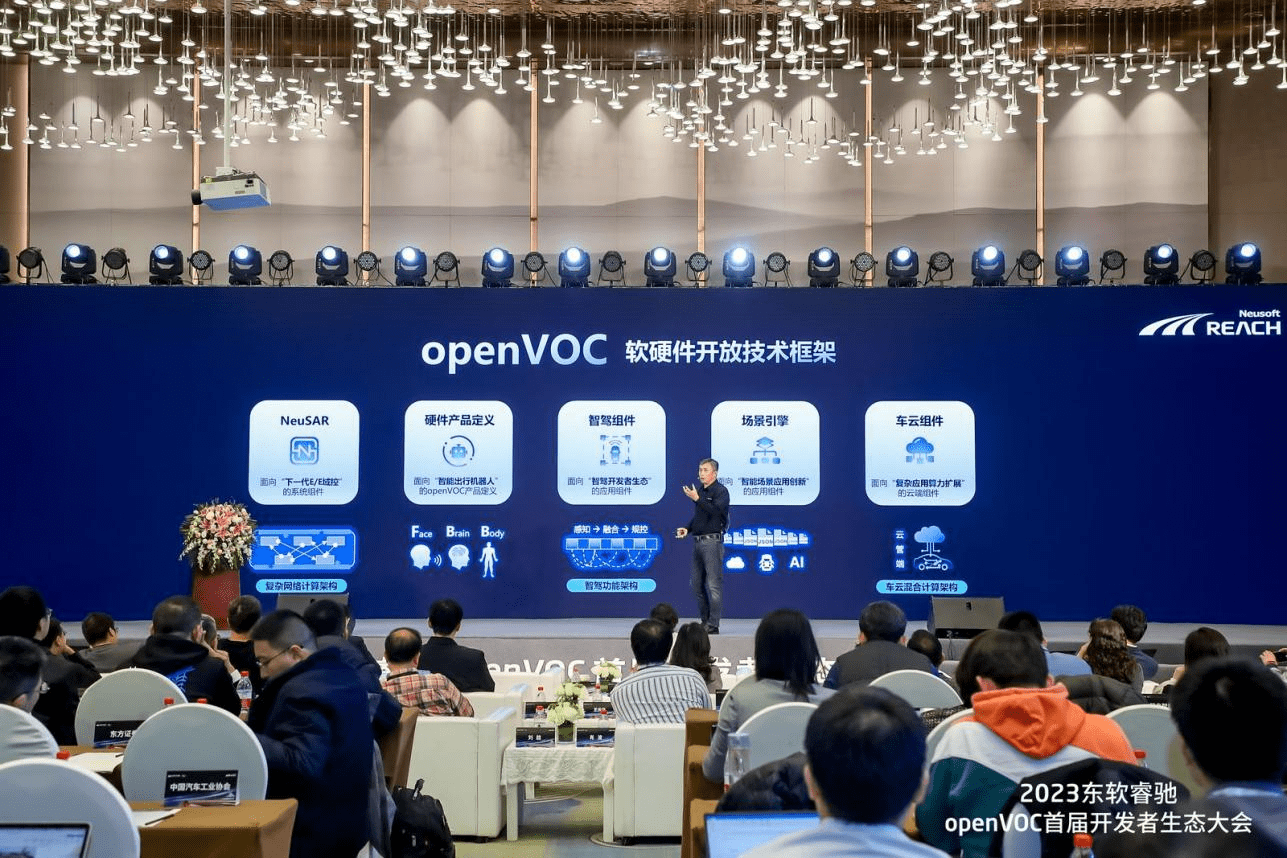
具体来看,openVOC共由5个部分所组成,分别是NeuSAR、智驾组件、场景引擎、车云组件和硬件产品定义。
其中NeuSAR作为面向“新新一代E/E架构域控研发”的系统组件,通过将车内计算模型抽象为“复杂网络计算架构”,对车内系统软件架构进行一定的系统分层,能够给大家提供中间件服务框架、标准AUTOSAR基础软件和工具链等组件和工具,辅助开发者逐层解决复杂的系统开发问题。
该组件目前已升级到 4.2版本,基于openVOC开放技术框架指引,全新升级了整车消息总线VMB,并面向无人驾驶关键需求来做了特性强化。不仅如此,NeuSAR 4.2还首次引入了Python开发框架,除提供对基础组件和服务的访问能力外,同时支持Web Service调用方式,极大地降低了软件开发难度。
在曹斌看来,接下来智能汽车应用创新,除了传统汽车产业链上的参与者,第三方应用软件开发商也将扮演重要角色。“啥意思?就是未来车上有极大几率会出现很多传统开发者想不到的功能,被第三方开发者想到了,并且做出来,从而在市场上占据一定的份额。还可以大胆猜测,未来汽车软件领域真正的核心玩家,现在可能还没再次出现在牌桌上。”曹斌指出。降低这部分开发者的入局门槛,正是openVOC的核心目标之一。
而在工具链层面,NeuSAR则能够给大家提供跨域系统功能的统一基础软件配置界面,覆盖设计、开发、调试、部署、测试、集成等完整开发过程,并支持Windows/Linux桌面应用和云端Web多种不同部署方式,以及本地USBKey基于远程服务器等多种授权管理方式,大幅度的提高了软件开发者的使用效率。
值得一提的是,本次活动上国际公认的测试、检验和认证机构SGS正式为东软睿驰颁发了ISO 26262:2018汽车功能安全ASIL-B产品认证证书,标志着NeuSAR aCore已按照ISO 26262:2018版规定要求,实现了功能安全等级为ASIL-B的产品研究开发,成为全世界领先通过该认证的AUTOSAR AP标准产品。

智能驾驶应用开发,也是openVOC关注的重点。得益于传感器、芯片、算法等核心技术不断取得新突破,当前智能驾驶已经迈入快速普及阶段,然而在实际量产过程中,整个行业依然面临创新性和工程化两大关键性挑战:第一,如何满足计算机显示终端日渐增长的功能创新需求;第二,如何高效解决OEM在量产中的复杂工程化问题。
为此,在openVOC框架下,原本定制化的链条开发的应用算法架构,转变为基于消息订阅与发布的灵活组合,实现算法间方便地互相调用、多种算法高效便捷地组合,降低了应用组件之间适配的复杂度,实现组件间的高速数据传输和高效硬件资源调度,最终达成二进制的组件复用。据悉,该智能驾驶应用开发组件目前已能够解决车企超过80%的工程化任务。
考虑到智能汽车应用开发过程中,开始涌现慢慢的变多的上云需求,openVOC面向车云混合计算应用,还能够给大家提供NXMQ通信、数字镜像云、无人驾驶云工具组件等完整上云组件,以及云安卓和基于数据的仿真环境、无人驾驶开发工具平台,充分的利用云平台的弹性和分布式优势,释放本地芯片算力,提高资源灵活性和可用性。
面向智能场景应用创新,openVOC也构建了专门的应用组件场景引擎,通过接入数据、服务、AI等组件,可提供动态数据、动态服务、动态场景的全套工具链,实现500+脚本并发,并支持灰度发布以及服务上云的配置和管理,显著缩短从设计到工程落地的周期。
今年以来,智能电动汽车行业的竞争格局日趋白热化,各大整车厂之间不断掀起价格战,争夺市场占有率。在如此激烈的市场之间的竞争下,车企不再仅仅关注整车本身的性能和品质,而是开始更看重量产速度和性价比。
在此背景下,东软睿驰openVOC开放技术框架的提出,可以说为行业提供了一种全新的解决方案,有望帮助产业链上下游企业更好地应对市场变化和竞争压力,大幅度的提高创新速度的同时,降低整车开发成本。
面向未来智能出行机器人时代,openVOC无疑提出了一种全新的开发范式,但要真正落地这套技术框架,还离不开生态协同。
纵观汽车工业发展的内在逻辑,归根结底是需求越来越复杂,越来越细化。当需求达到一定的复杂程度,传统开发理念和标准必然难以支撑,需要行业的分工和集约。燃油车时代,整车制造从手工式作坊到流水线生产,再到精益生产的持续变革,就是最直接的证明。
“软件也是一样,甚至我们大家都认为,未来所有行业走到一定阶段都需要分工和合作,通过生态去解决成本和创新问题。”曹斌认为。
一方面,随着整车功能日益复杂化,很多软件仅仅依靠整车厂和Tier1,将越来越难以满足需求,这也是为什么当前很多车企和零部件供应商都在构建自己的“生态圈”。另一方面,从商业模式来看,未来软件真正可以帮助汽车行业减少相关成本,实现可持续的商业收益,重点是规模化复用,但如果一家公司从上到下所有的软件都自己做,是很难实现这样的高度复用,开放的生态合作也势在必行。
“想象一下,如果一个企业开发的软件模块,可以搭载在所有汽车上,这无疑是一个优秀的软件供应商。”曹斌指出,这也是东软睿驰一直以来的目标。
为此,自2018年在汽车行业率先提出“软件定义汽车”概念,过去数年里,东软睿驰除了持续探索新的软件开发理念和方法,同时也在积极构建开放的产业生态,目标成为“软件定义汽车”的最大公约数。
发展到现在,东软睿驰相关软件开发平台及产品已先后与众多算法、通讯、安全、芯片以及微内核等公司进行了适配与集成,被大范围的应用于智能辅助驾驶、整车场景化智能、底盘动力、车身控制等系统,适配周期可按“周”计算,半年时间基本可进入整车测试的准量产状态,充分实现了行业软件资产的复用。

本次活动上,芯驰科技CTO孙鸣乐、联合电子跨域控制业务部首席生态官余浩杰、小马智行工程副总裁肖波、SGS中国功能安全中心产品线总监郑峥也相继上台分享了与东软睿驰的合作经验。
在与芯驰的合作中,据悉东软睿驰的基础软件已与芯驰全系列芯片实现适配,并在多家车企实现了相关方案量产,目前两家公司正共同开发面向未来中央计算架构的软硬件解决方案。通过携手联合电子,两家公司也成功实现了中央计算平台与区域控制器的部署。而在与小马智行的合作中,东软睿驰则提供了包含车载计算单元、底软、中间件和无人驾驶软件模块在内的多方面支持,在openVOC开放技术框架的支持下,以迁移成本最低的方式去进行模块的迁移和集成,高效实现POC搭建并且稳定用到量产方案中,助力相应的高阶智驾方案快速落地。
下一阶段,东软睿驰的核心目标是,立足于openVOC开放技术框架,逐步推动汽车行业技术和应用创新。
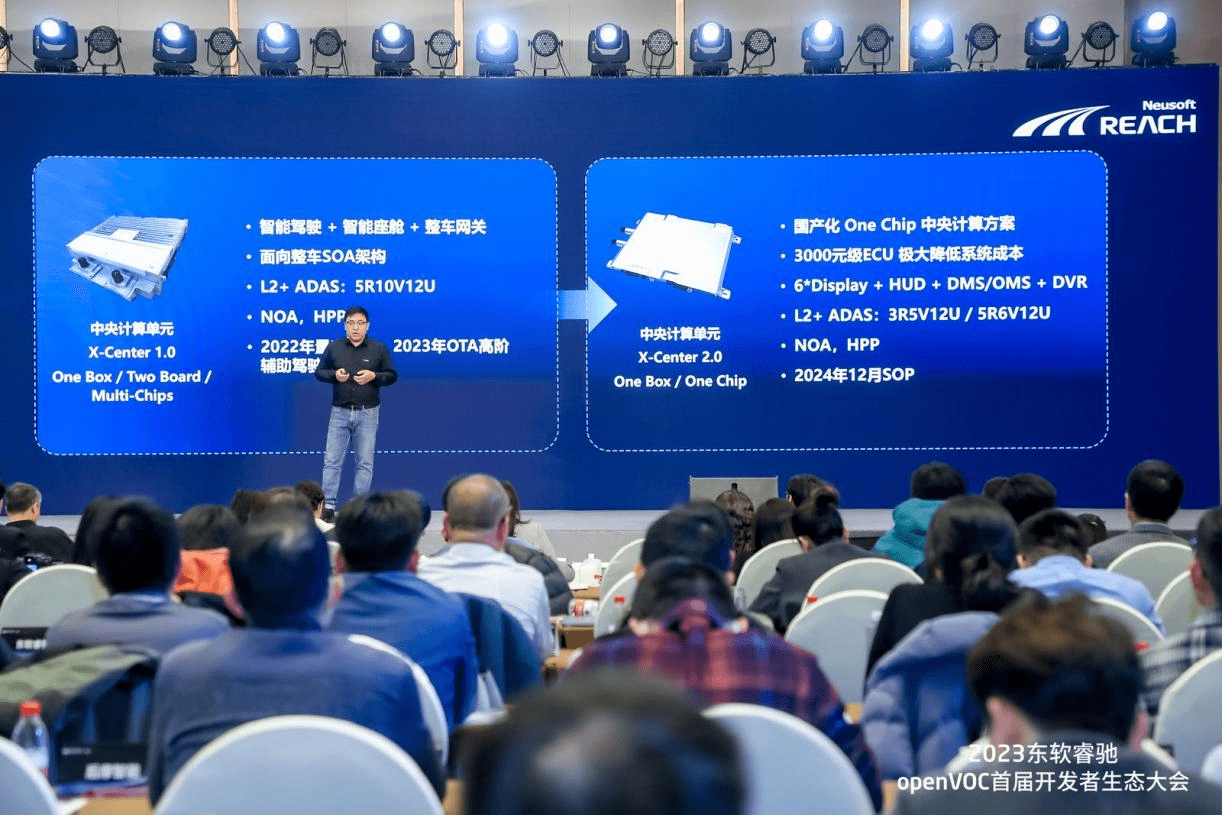
目前,东软睿驰已经推出了符合openVOC开放技术架构的软硬一体产品实践案例——X-Center 2.0,并于此次活动公布了一系列产品详情。相比于此前发布的中央计算单元,X-Center 2.0通过一颗芯片就可以实现多样化的智驾和智舱功能,真正的完成One-Box,One-Chip。
X-Center 2.0能够给大家提供40 TOPS AI算力、200 KDMIPS CPU算力以及440 GFLOPS 3D渲染算力,在智能座舱方面能够支持高至2K的多联屏显示、AR-HUD、液晶仪表、影音娱乐、网络互联等功能,以及麦克风、音响、蓝牙、4G网络、语音视觉多模态交互等模块。
在智能驾驶方面,则能支持3R5V12U、5R6V12U等多种不同的传感器配置,实现30余项L2+智驾功能,包括高速NOA、记忆泊车HPA、高度公路辅助驾驶HWA等主流应用。
值得一提的是,今年以来汽车行业“内卷”持续加剧,曹斌认为要破除这一僵局,生态协作也是必经之路。“接下来,我们大家都认为行业将会迈入生态构建的全新阶段,因为整个行业都想通过生态合作更加敏捷地应对创新和成本压力。”
不仅如此,在曹斌看来,本土企业也只有把国内领先的技术和创新优势转化为生态优势,才能更好地保持竞争力。“毕竟相比于复制技术,生态复制更难,而生态构建越早越好。”
目前来看,通过openVOC开放技术框架的推出,东软睿驰已经成功占据了先发优势。
声明:本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。
