
时间: 2023-08-18 08:48:41 作者: 防控抗疫
当今,无人驾驶技术已成为整个汽车产业的最新发展趋势。应用无人驾驶技术能全方面提升汽车驾驶的安全性、舒适性,满足更高层次的市场需求等。无人驾驶技术得益于人工智能技术的应用及推广,在环境感知、精准定位、决策与规划、控制与执行、高精地图与车联网 V2X 等方面实现了全面提升。科研院校、汽车制造厂商、科技公司、无人驾驶汽车勇于探索商业模式的公司和汽车零部件供应商在无人驾驶技术领域进行不断地探索,寻求通过人工智能技术来获得技术上的新突破。本报告在此背景下,对无人驾驶汽车进行了简单梳理,包括以下内容:
无人驾驶汽车概念。首先对自动驾驶汽车相关概念、技术和技术价值进行介绍,接着对国外、国内无人驾驶汽车发展历史及现在的状况进行了梳理。
无人驾驶汽研究情况。对自动驾驶技术探讨研究中的重要技术进行介绍。无人驾驶汽车 领域专业的人介绍。通过 AMiner 大数据平台对 AMiner 的无人驾驶人才库进行数据挖掘,统计分析出领域内学者分布及迁徙。同时,介绍了目前无人驾驶汽车领域的国内外代表性研究学者。
无人驾驶汽车应用介绍。无人驾驶汽车已经以交通参与者的身份来到了我们身边,未来主要的应用方向包括公共交通、快递运输、服务于老年人和残疾人等。
无人驾驶汽车趋势介绍。到2020年,过去积累的无人驾驶技术科研成果及工程进步都将成为现实。自动驾驶汽车即将进入10~20年混合模式的时代。随着自动驾驶汽车和AI的深层次地融合,无人驾驶汽车能轻松实现高度智能化,线+级的无人驾驶技术。在享受科技成果的同时,我们也需要认识到,无人驾驶技术能带来无限憧憬,但也会给社会生活带来非常大的冲击,同时,还面临着巨大挑战。
无人驾驶汽车又称智能汽车、自主汽车、无人驾驶汽车或轮式移动机器人,是一种通过计算机实现无人驾驶的智能汽车。
概念篇首先对无人驾驶汽车涉及到的相关概念进行介绍,包括无人驾驶汽车等级标准、智能汽车、无人驾驶汽车等;接着对自动驾驶汽车技术及其技术价值进行概括介绍;重点描绘了国外、国内无人驾驶汽车发展图谱
Level 0:无自动化,由人类驾驶员全程操控汽车,但能够获得示警式或须干预的辅助信息。
Level 1:辅助驾驶,利用环境感知信息对转向或纵向加减速进行闭环控制,其余工作由人类驾驶员完成。
Level 2:部分自动化,利用环境感知信息同时对转向和纵向加减速进行闭环控制,其余工作由人类驾驶员完成
Level 3:有条件自动化,由无人驾驶系统完成所有驾驶操作,人类驾驶员根据系统请求进行干预。
Level 4:高度自动化,由无人驾驶系统完成所有驾驶操作,无需人类驾驶员进行任何干预,但须限定道路和功能。
Level 5:完全自动化,由无人驾驶系统完成所有的驾驶操作,人类驾驶员能够应付的所有道路和环境,系统也能完全自动完成
目前对于无人驾驶汽车的研究有两条不同的技术路线:一条是渐进提高汽车驾驶的自动化水平;另一条是“一步到位”的无人驾驶技术发展路线 标准能够准确的看出,通常大家谈论的无人驾驶汽车对应该标准的Level 4 和Level 5 级。无人驾驶汽车是无人驾驶的一种表现形式,它具有整个道路环境中所有与车辆安全性相关的控制功能,不需要驾驶员对车辆实施控制
在我国,与无人驾驶汽车这个术语相关的概念还有智能汽车。相对于无人驾驶汽车概念,智能汽车定义涵盖的范围更广。《中国制造2025》将智能网联汽车定义为指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车内网、车外网、车际网的无缝链接,具备信息共享、复杂环境感知、智能化决策、自动化协同等控制功能,与智能公路和辅助设施组成的智能出行系统,可实现“高效、安全、舒适、节能”行驶的新一代汽车[5]
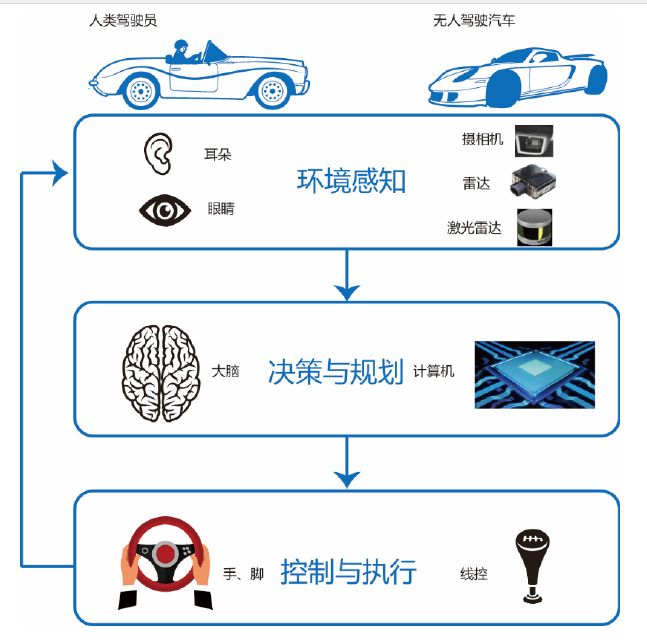
无人驾驶技术是对人类驾驶员在长期驾驶实践中,对“环境感知—决策与规划—控制与执行”过程的理解、学习和记忆的物化,如右图所示。无人驾驶汽车是一个复杂的、软硬件结合的智能自动化系统,运用到了自动控制技术、现代传感技术、计算机技术、信息与通信技术和人工智能等。本报告会在技术篇进行详解
无人驾驶汽车之所以受到各国政府前所未有的重视,国内外各院校、研究机构都投入了大量人力、物力,各大车企、科技公司、汽车零部件供应商以及无人驾驶汽车勇于探索商业模式的公司也纷纷在这样的领域进行布局,它主要具有以下价值,如下图所示

改善交通安全。驾驶员的过失责任是交通事故的重要的因素。无人驾驶汽车不受人的心理和情绪干扰,保证遵守交通法规,按照规划路线行驶,可以轻松又有效地减少人为疏失所造成的交通事故。
实现节能减排。由于通过合理调度实现共享出行,减少了私家车购买数量,车辆绝对量的减少,将使温室气体排量大幅降低。
消除交通拥堵,提升社会效率。无人驾驶汽车能够最终靠提高车速、缩小车距以及选择更有效路线来减少通勤所耗时间。
拉动汽车、电子、通信、服务、社会管理等协同发展,对促进我国产业转型升级具有重大战略意义

以谷歌为代表的新技术力量纷纷入局无人驾驶领域。这一些企业多采用“一步到位”的无人驾驶技术发展路线,即直接研发SAE Level 4+级别的无人驾驶汽车。
2009 年,谷歌公司宣布,由斯坦福人工智能实验室前主任、谷歌街景的联合发明人Sebastian Thrun 领导组建一支团队,开始研发无人驾驶技术。
2012 年,美国内华达州的机动车辆管理部门为谷歌公司颁发了全球首例无人驾驶汽车的路测许可证。2015 年,谷歌公司的无人驾驶原型车上路来测试,该车没有方向盘、油门踏板与刹车踏板,同时也没有后视镜,只配有启动和停止两个物理按钮,通过很多传感器、车载计算机来控制汽车
2016 年12 月,谷歌将无人驾驶业务独立出来,成立了独立公司——aymo。自2017年10 月,Google Waymo 已在美国凤凰城Chandler 镇100 平方英里范围内,对600 辆克莱斯勒插电式混合动力Level 4 级无人驾驶汽车进行社会公测,这是Waymo 无人驾驶商业化落地的前奏,首次实现了无驾驶员和安全员的公测无人驾驶出租车。当地时间2018 年5 月31 日,Waymo 宣布向菲亚特·克莱斯勒(FCA)采购62000 辆Pacifica 混动厢式车用于打造无人驾驶出租车队。
除车辆采购以外,Waymo 与FCA 双方还在商讨如何将无人驾驶汽车卖给普通用户。这也代表着,在不远的将来,普通用户都能够在FCA 的门店里买到一辆其与Waymo 共同打造的无人驾驶汽车。2018 年,谷歌还与捷豹路虎合作,计划在2020 年之前生产另外20000 辆无人驾驶出租车

2016 年5 月,Uber 无人驾驶汽车在位于美国宾夕法尼亚州匹兹堡市的Uber 先进的技术中心正式上路测试。Uber 首次路测使用的无人驾驶汽车是一款福特Fusion 混合动力汽车,它一起进行采集测绘数据并试验无人驾驶功能。Uber 无人驾驶汽车配备了各式传感器,包括毫米波雷达、激光雷达以及高分辨率摄像机,以便绘制旁边的环境的细节。2016 年9 月14日,Uber 在美国匹兹堡市推出城区大范围无人驾驶出租车免费载客服务并试运行;尽管上面有两名安全工程师,但商业模式却是大范围的城区,比Waymo 公测的小镇要大得多
以nuTonomy 为代表的勇于探索商业模式的公司也纷纷入局无人驾驶领域。这一些企业多采用“一步到位”的SAE Level 4+的无人驾驶技术发展路线。
nuTonomy 是一家于2013 年从麻省理工学院分离出来的勇于探索商业模式的公司。2016 年8 月,它成为了新加坡第一家在试点项目下推出无人驾驶出租车的公司。在新加坡的测试中,nuTonomy在无人驾驶汽车上配备了6 套激光雷达检测系统,前面安装有2 个摄像机,用于识别障碍物,检测交通信号灯变化。此外,车前座还配备一名司机以应对紧急状况,在后座配备一名研究人员,其职责是观察车载计算机。2017 年10 月,德尔福宣布收购nuTonomy。
Zoox 是硅谷一家神秘的无人驾驶汽车初创公司,目前已经筹集3.6 亿美元。Zoox 很少向外界介绍其进展。消息显示,Zoox 秘密开发全自动驾驶汽车已有多年。2013 年,该公司展示了其车辆的渲染图。根据IEEE 的消息,该公司的车型没有挡风玻璃、方向盘和刹车踏板。这种汽车能向任意方向行驶,乘客将面对面而坐。


与美、欧等发达国家相比,我国在无人驾驶汽车方面的研究起步稍晚,从20 世纪80 年代末才开始。不同于国外车企以自主研发为主,我国汽车制造厂商多采取与国内科研院所、高校合作研发无人驾驶技术。
国防科技大学从20 世纪80 年代末开始先后研制出基于视觉的CITAVT 系列智能车辆。
其中,在CITAVT-Ⅰ、CITAVT-Ⅱ型无人驾驶小车的研制过程中对无人驾驶汽车的原理进行了研究;CITAVT-Ⅲ型的研究以实现在非结构化道路下遥控和自主驾驶为目的;CITAVT-Ⅳ型自主驾驶车基于BJ2020SG 吉普车改装而成,该车型以研究结构化道路环境下的自主驾驶技术为目标,空载条件下速度最高为110km/h,车辆具有人工驾驶、遥控驾驶、非结构化道路上的低速自主驾驶和结构化道路上的自主驾驶四种工作模式。直至1992 年,国防科技大学才成功研制出中国第一辆真正意义上的无人驾驶汽车
不同于国外车企以自主研发为主,我国汽车制造厂商多采取与国内科研院所、高校合作研发无人驾驶技术。
一汽集团于2007 年与国防科技大学合作。2011 年7 月,由一汽集团与国防科技大学共同研制的红旗HQ3 无人驾驶汽车完成了286km 的面向高速公路的全程无人驾驶试验,人工干预的距离仅占总里程的0.78%。2015 年4 月,一汽集团正式对外发布了其“挚途”技术战略,标志着一汽集团的互联智能汽车技术战略规划正式形成。2015 年4 月19 日,一汽在同济大学举行了“挚途”技术实车体验会,包含手机叫车、自主泊车、拥堵跟车、自主驾驶等四项智能化技术。
2012 年,军事交通学院的“军交猛狮Ⅲ号”以无人驾驶状态行驶114km,最高时速为105km/h。该车装有由5 个毫米波雷达、3 个摄像机和1 个GPS 传感器组成的视听感知系统,可以帮助无人驾驶车辆识别路况,精确判断与前后左右障碍物的距离
除了上述传统的汽车制造厂商在无人驾驶领域的研究外,以百度为代表的高科技公司也相继加入了无人驾驶汽车领域的研究。百度公司于2013 年开始了百度无人驾驶汽车项目,其技术核心是“百度汽车大脑”,包括高精度地图、定位、感知、智能决策与控制四大模块。
2015 年12 月初,百度无人驾驶汽车在北京进行无人驾驶测跑,实现多次跟车减速、变道、超车、上下匝道、调头等复杂驾驶动作,完成了进入高速到驶出高速不同道路场景的切换,最高车速达到100km/h。
2015 年12 月14 日,百度宣布正式成立无人驾驶事业部。2017 年4 月17 日,百度展示了与博世合作开发的高速公路辅助功能增强版演示车。2018 年7 月4 日,百度在第二届百度AI 开发者大会(Baidu Create 2018)上宣布,与厦门金龙合作生产的首款Level 4 级自驾巴士“阿波龙”已经量产下线 辆车接下来会被投放到北京、深圳、武汉等城市,在机场、工业园区、公园等行驶范围相对固定的场所开始商业化运营。2019 年年初,百度还会跟日本软银旗下的SB Drive 合作,将10 辆“阿波龙”带去包括东京在内的多个日城市。
这款无人驾驶巴士是基于百度的阿波罗自驾车开放平台(3.0 版本)。除了能在某些特定条件下实现无人工介入的无人驾驶,其还加入了自动泊车、面部识别及驾驶者疲劳度检测等功能。另外,在大会现场百度还宣布会与英特尔合作,将Mobileye 的责任敏感安全模型(Responsibility Sensitive Safety)及周围计算机视觉套件整合入阿波罗,希望以此来逐步提升该平台的行车安全性

技术篇着重对无人驾驶技术探讨研究中的重要技术进行介绍。其中,无人驾驶汽车关键技术包括环境感知、精准定位、决策与规划、控制与执行、高精地图与车联网V2X 以及无人驾驶汽车测试与验证技术;AI在无人驾驶汽车中的应用包括AI在环境感知中的应用、AI在决策规划中的应用、AI在车辆控制中的应用。
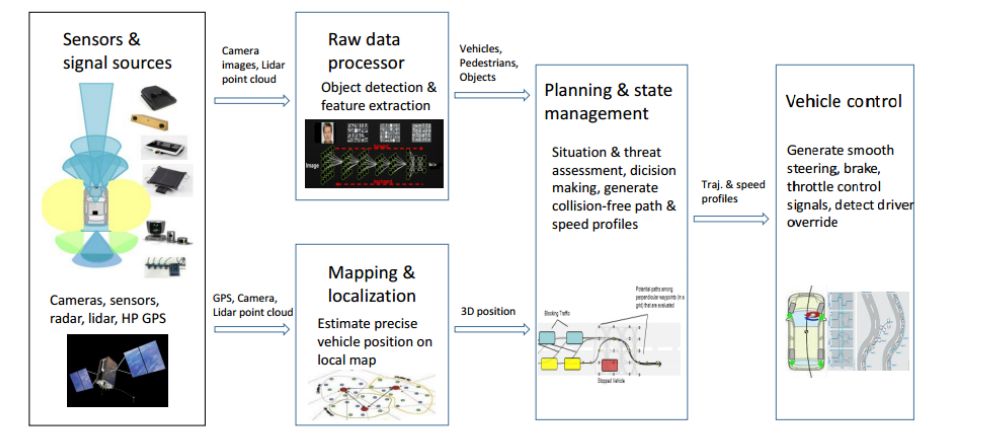
自动驾驶汽车通过摄像机、激光雷达、毫米波雷达、超声波等车载传感器来感知周围的环境,依据所获取的信息来进行决策判断,由适当的工作模型来制定相应的策略,如预测本车与其他车辆、行人等在未来一段时间内的运动状态,并进行避碰路径规划。在规划好路径之后,接下来需要控制车辆沿着期望的轨迹行驶。车辆控制管理系统包括横向控制(转向)与纵向控制(速度)。当然,上述的动作都是基于传感器实时获取环境信息所做的局部路径规划下的动作,还需要与基于完整环境信息的全局路径相结合,如下图所示。
环境感知作为别的部分的基础,处于无人驾驶汽车与外界环境信息交互的关键位置,是实现无人驾驶的前提,起着人类驾驶员“眼睛”“耳朵”的作用。环境感知技术是利用摄像机、激光雷达、毫米波雷达、超声波等车载传感器,以及V2X 和5G 网络等获取汽车所处的交通环境信息和车辆状态信息等多源信息,为无人驾驶汽车的决策规划进行服务。
自动驾驶汽车中配置的视觉传感器主要是工业摄像机,它是最接近于人眼获取周围环境信息的传感器。摄像机可以识别车辆行驶环境中的车辆、行人、车道线、路标、交通标志、交通信号灯等。它具有较高的图像稳定性、抗干扰能力和传输能力等特点。摄像机按照芯片类型可分为CCD 摄像机和CMOS 摄像机两种。
激光雷达是以发射激光束来探测目标空间位置的主动测量设备。根据探测原理,激光雷达分为单线(二维)激光雷达和多线(三维)激光雷达。
单线激光雷达,通过发出一束激光扫描线对区域进行旋转扫描,并根据区域内各个点与激光雷达的相对空间距离与方位,返回测量值
自动驾驶汽车的基础是精准导航,不仅需要获取车辆与外界环境的相对位置关系,还一定要通过车身状态感知确定车辆的绝对位置与方位。
惯性导航系统由陀螺仪和加速度计构成,通过测量运动载体的线加速度和角速率数据,并将这一些数据对时间进行积分运算,从而得到速度、位置和姿态。惯性导航系统以牛顿力学定律为基础,工作原理是根据陀螺仪的输出建立导航坐标系并给出姿态角,再根据加速度计的输出解算出运动载体的速度和位置,实现惯性参考系到导航坐标系的转换。惯导属于推算导航方式,即在已知基准点位置的前提下根据连续观测推算出下一点的位置,因而可连续测出运动载体的当前位置
目前全球卫星导航系统包括美国的GPS、俄罗斯的GLONASS、中国的北斗卫星导航系统。
GPS 是由美国国防部研制的全球首个定位导航服务系统,空间段由平均分布在6 个轨道面上的24 颗导航卫星组成,采用WGS-84 坐标系。
GLONASS 由苏联在1976 年启动建设,正式组网比GPS 还早。苏联解体后,GLONASS由俄罗斯负责运营。空间段由27 颗工作星和3 颗备份星组成,27 颗星均匀地分布在3 个近圆形的轨道平面上。
北斗卫星导航系统是中国自主研发、独立运行的全球卫星定位与通信系统,空间段包括5 颗静止轨道卫星和30 颗非静止轨道卫星,采用我国独自建立使用的CGCS 2000 坐标系
无人驾驶汽车的行为决策与路径规划是指依据环境感知和导航子系统输出信息,通过一些特定的约束条件如无碰撞、安全到达终点等,规划出给定起止点之间多条可选安全路径,并在这些路径中选取一条最优的路径作为车辆行驶轨迹。
路径规划:即路径局部规划时,自动驾驶车辆中的路径规划算法会在行驶任务设定之后将达成目标的最佳路径选取出来,避免碰撞和保持安全距离。在此过程中,会对路径的曲率和弧长等做综合考量,以此来实现路径选择的最优化。
驾驶任务规划:即全局路径规划,主要的规划内容是指行驶路径范围的规划。当无人驾驶汽车上路行驶时,驾驶任务规划会为汽车的自主驾驶提供方向引导方面的行为决策方案,通过GPS 技术进行即将需要前进行驶的路段和途径区域的规划与顺序排列。
基于神经网络:无人驾驶汽车的决策系统主要是采用神经网络确定具体的场景并做出适当的行为决策。
基于规则:工程师想出所有可能的“if-then 规则”的组合,然后再用基于规则的技术路线对汽车的决策系统来进行编程。
混合路线:结合了以上两种决策方式,通过集中性神经网络优化,通过“if-then 规则”完善。混合路线是最流行的技术路线
通过统计分析AMiner 的无人驾驶人才库,我们得到了全球自动驾驶领域学者分布图,如下图所示。从图中能够正常的看到,无人驾驶领域的学者主要分布在美国,其次是欧洲。中国对无人驾驶汽车的研究紧跟其后,南美洲、非洲和大洋洲则人才相对来说还是比较匮乏。
图14 无人驾驶领域研究学者全球分布按国家进行统计来看美国是无人驾驶汽车科技发展的核心。中国的人数紧排在美国之后。
图15 无人驾驶领域研究学者全球分布AMiner 对全球自动驾驶汽车领域最具影响力的1000 人的迁徙路径进行了统计分析,得出下图所示的各国人才逆顺差对比图。

业界一致认为,无人驾驶技术在公共交通领域和特定场所的使用将早于在个人乘用车市场的普及。无人驾驶汽车将最先应用的行业包括公共交通、快递运输、服务于老年人和残疾人,如下图所示

相比于小汽车,公共交通更能惠及普通群众,让民众感受到人工智能、无人驾驶带来的技术革新和便利,这也是该项技术最初的出发点。
自动驾驶巴士被认为是解决城市“最后一公里”难题的有效方案,大多用于机场、旅游景区和办公园区等封闭的场所。前面我们提到百度Level 4 级量产自驾巴士“阿波龙”已经量产下线。

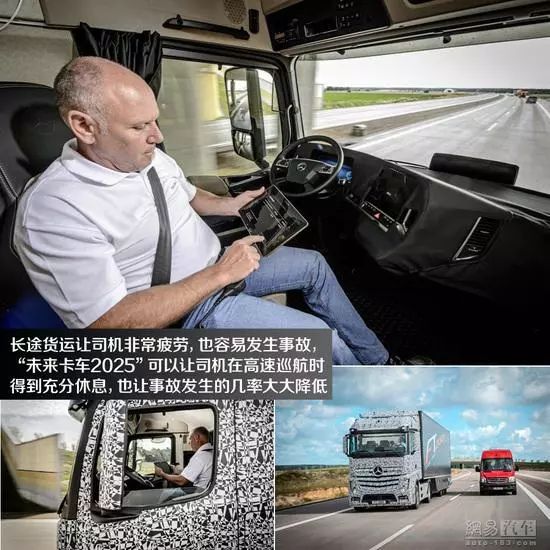
快递用车和“列队”卡车将是另外一个较快采取了自动驾驶汽车的领域。随着全球老龄化问题的加剧,无人驾驶技术在快递等行业的应用将极大地弥补劳动力不足的问题,并且随着无人驾驶技术的成熟与市场普及程度的提高,无人配送将成为必然的趋势。
2017 年“6·18”,京东首批试点运营的无人配送车在中国人民大学进行快递投递。2018年“6·18”,在京东的北京上地配送站,20 余台配送机器人整齐列阵。随着调度平台命令发出,首批载有“6·18”货物订单的3 辆配送机器人依次出发,自动奔向订单配送的目的地。
目前,京东已经在北京、上海、天津、广州、贵阳、武汉、西安等20 多个国内城市和泰国曼谷、印尼雅加达就配送机器人项目的应用开展布局,共投放了100 多台机器人,明年计划投放至万余台。

未来设想与目标实现据《日本经济新闻》5 月18 日报道,欧盟的欧洲委员会当地时间5 月17 日公布的无人驾驶时间进度表指出,计划到2020 年在高速上实现无人驾驶,在城市中心区域实现低速无人驾驶;到2030 年普及完全无人驾驶。为了助力无人驾驶,到2022 年,欧盟所有新车都将具备通信功能,实现100%“车联网”。委员会呼吁成员国和汽车企业制定确保安全和明确事故责任的通用规则。力争在国际规则出台之前制定出地区标准,在新一代产业领域掌握主导权。
此前,我国发布的《节能与新能源汽车技术路线 年,驾驶辅助/部分无人驾驶车辆市场占有率将达50%;到2025 年,高度无人驾驶车辆市场占有率将达约15%;
美国当地时间2018 年3 月18 日晚,优步无人驾驶测试车在亚利桑那州坦佩市郊区,与一名横穿马路的中年妇女相撞,事故导致该女子不幸身亡。这是人类历史上第一起无人驾驶汽车致人死亡事件。
美国当地时间2018 年3 月23 日,在加利福尼亚州山景城101 高速公路上一辆高速行驶中的特斯拉Model X 与路边隔离带相撞,导致车头部分完全损毁,并引发电池起火,驾驶员不幸遇难。
以上这些无人驾驶车辆事故表明,无人驾驶技术距离成熟应用还有一段漫长而艰辛的发展历史,这不是一蹴而就的。目前,国内无人驾驶技术取得了长足的进步,无人驾驶汽车也逐步得到了公众的认可,但是要实现无人驾驶汽车的普及化仍然需要很长的路要走。核心技术水平不高,关键零部件非国产化严重,政策法规需要逐步完善等问题依然要一直努力;
上一篇:无人驾驶技术的发展与现状论文
下一篇:什么是L2级无人驾驶辅助系统
